DQN算法
Q-learning
Q-learning方法可以通过动态规划的方法,对Q值表进行迭代更新来实现。其具体步骤如下:
- 初始化一个状态-动作值映射的空表(全0);
- 通过与环境交互获得$(s,a,r,s’)$,在这一步需要决定要采取何种动作,如何选择动作没有唯一的正确方法(exploration vs expolitation)
- 使用Bellman方程近似更新$Q(s,a)$:
$Q(s,a)\leftarrow r+\gamma max_{a’\in A}Q(s’,a’)\tag{1}$ - 检查收敛条件,若不满足,从步骤2.继续这一过程。
由于从环境中采样,在现有的value上直接赋以新的值通常会使得训练变得不稳定。实际中是使用混合(“blending”)技巧来近似更新$Q(s,a)$,具体是:使用值在0~1之间的学习率$\alpha$来平衡新、旧Q值,以使得Q值更加平滑地收敛(即使环境有噪声):
$Q(s,a)\leftarrow (1-\alpha)Q(s,a)+\alpha(r+\gamma max_{a’\in A}Q(s’,a’))\tag{2}$
上式中的Bellman更新可以重写为:
$Q(s,a)\leftarrow Q(s,a)+\alpha\delta_k(s,r,s’)\tag{3}$
其中的$\delta_k(s,r,s’)=r+\gamma max{a’\in A}Q(s’,a’)-Q(s,a)$就是所谓的TD error。
Deep Q Network
但是值迭代法有个问题:当状态空间数很大时,需要维护一个很大的Q值表,对于连续状态空间甚至无法给出这样的Q值表。为解决这类问题,可以采用神经网络来学习关于Q值的一个“函数”,以此来代替Q值表的存储。DQN便是这一方法的典型代表。
该算法在2013年被DeepMind团队提出,15年发表于Nature的文章Human-level control through deep reinforcement learning加入了target network以提高算法稳定性。
该算法使用神经网络来近似Q指标,这样做可以将存储Q表替换为存储能将对应的状态映射为Q值的函数(网络参数)。此外,这样做还使得网络可以处理连续的状态空间而无需对其进行离散化。
DQN算法将值迭代过程转化为类似于监督学习的方式,通过梯度下降的方法进行训练学习。在训练的每次迭代过程中调节网络参数以减少Bellman方程中的均方误差。其中目标值$r+\gamma max_{a’}Q^*(s’,a’)$被近似替换为$r+\gamma max_{a’}Q(s’,a’;\theta_i^-)$,$\theta_i^-$是前轮迭代的参数。最终损失函数为:
$L_i = \mathbb E[((r+\gamma max_{a’}Q(s’,a’;\theta_i^-))-Q(s,a;\theta_i))^2]\tag{4}$
DQN是model-free的:因为它通过直接使用从仿真器得到的样本来解决强化学习任务,而不需要显式地估计奖励与转移的动态特性$P(r,s’|s,a)$。DQN也是off-policy的:它在训练过程中学习的是贪心策略$a=argmax_{a’}Q(s,a’;\theta)$,而其动作分布却保证了对状态空间一定程度的探索($\varepsilon-greedy$),即以概率$\varepsilon$随机选择动作,以概率$1-\varepsilon$遵循贪心策略。
由于DQN是off-policy的,所以可以从过去的旧的经验中学习,即可以采用经验回放(experience replay)来存储过往经验,然后从经验回放池中每次均匀随机采样一个minibatch数据来对网络进行训练。这样做的好处:每个样本都可以被多次使用,从而提高了样本效率;从连续的样本中学习是低效的,因为连续的样本之间有较强的相关性,这与梯度下降中要求的数据独立同分布条件矛盾,从经验池中随机采样可以减少这一相关性的影响。此外,从由相关性的样本中学习也会给策略带来bias,使得参数陷入局部最小值,导致错误的策略甚至算法不收敛。
为了提高使用神经网络后的稳定性,DQN使用了一个独立的目标网络来产生梯度下降过程中的目标值。训练过程中,每隔C次更新将网络$Q$的参数复制给目标网络$\hat{Q}$,并使用目标网络来产生用于接下来C次更新所需的目标值。对于online Q-learning算法,一次增加$Q(s_t,a_t)$的更新也会增加所有动作$a$的$Q(s_{t+1},a)$,从而也增加了目标值,导致策略的震荡甚至发散。使用旧参数充当目标网络在更新Q与该次更新影响目标值的时间之间增加了时延,从而减少了震荡或发散的可能性。
作者还发现将误差项$r+\gamma max_{a’}Q(s’,a’;\theta_i^-)-Q(s,a;\theta_i)$裁剪到(-1, 1)的范围内可提高算法稳定性。因为绝对值损失函数$|x|$对于有负值的$x$导数为-1,正值$x$导数为1。对误差项进行裁剪等效于:对超过(-1, 1)范围的误差使用绝对值损失函数。[P.S.]我个人觉得这里类似于深度学习损失函数中huber loss的作用,减少了异常值的影响,避免了过大的参数更新。
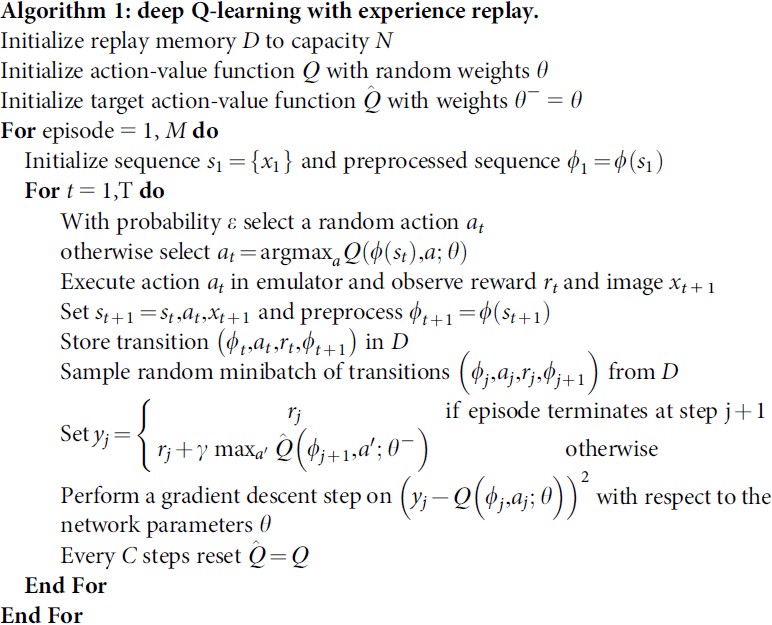
完整的DQN算法如下:
该算法的TensorFlow实现,关键更新部分代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
import tensorflow as tf
def train_on_batch(self, states, actions, rewards, next_states, dones):
actions = tf.cast(actions, dtype=tf.uint8)
next_Q_values = self.model_target(next_states)
# using target network to calculate target Q values
target_Q_values = rewards + (1 - dones) * self.gamma * tf.reduce_max(next_Q_values, axis=-1, keepdims=True)
# using one-hot operation to mask out irrelavant Q values
mask = tf.squeeze(tf.one_hot(actions, depth=2, dtype=tf.float32))
with tf.GradientTape() as tape:
Q_values_ = self.model(states)
Q_values = tf.reduce_sum(Q_values_ * mask, axis=1, keepdims=True)
loss = tf.reduce_mean(tf.keras.losses.MSE(target_Q_values, Q_values))
gradients = tape.gradient(loss, self.model.trainable_variables)
self.optimizer.apply_gradients(zip(gradients, self.model.trainable_variables))